Designing and testing our Goose prototype
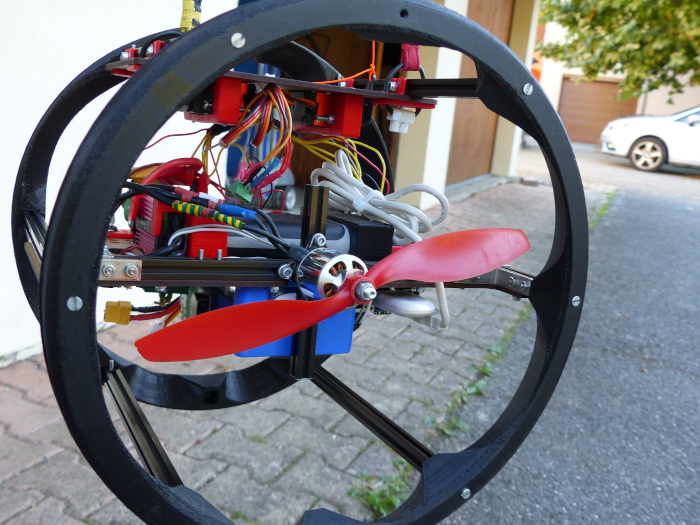
This summer we designed and built our new drone prototype named Goose. Its cylindrical structure changes from the previous one by allowing an easier access to the components while protecting the electronic boards during possible crashes. Its name comes from a prominent emergency stop button protruding from the front of the drone. It looks like the neck of a goose. We mainly worked on the implementation of a reliable communication protocol between the ground station and the drone. This protocol is based on an XBee digital link that allows real-time recovery of information from the drone such as its position and altitude. The first tests were conclusive and we were able to carry out flights in calm conditions!